Suiyi He (何隋一)
Welcome to Suiyi He's personal website!
欢迎来到何隋一的个人主页!
Willkommen auf Suiyi Hes persönlichen Webseite!
I will join Applied Intuition and work on planning and control algorithms for L4 autonomous truck this September.
I obtained my Ph.D. degree in Mechanical Engineering (Control) from University of Minnesota-Twin Cities. During my Ph.D. study, I worked on planning and control of connected and autonomous vehicles (CAVs) under the supervision of Prof. Zongxuan Sun.
Before joining UMN, I obtained my master degree in Mechanical Engineering from UC Berkeley. At Berkeley, I worked in Hybrid Robotics Group advised by Prof. Koushil Sreenath. I hold bachelor degrees in Mechatronics from both Tongji University (China) and Hochschule Esslingen (Germany). During my undergraduate study, I was a chassis engineer at TJU Racing, the Formula SAE team of Tongji University. I finished my bachelor thesis on sensor data fusion of commercial vehicle's advanced driver assistance system (ADAS) at Active Safety Team of Daimler Truck AG (Stuttgart, Germany).
In my free time, I'm interested in driving karting, racing simulator (like Assetto Corsa, Dirt Rally), skiing and playing the piano.
I'm open to research discussions and project collaborations, please feel free to get in touch!
Email / Google Scholar / GitHub / ResearchGate
Education

UMN Twin-Cities, 2021 - 2025
Ph.D., Mechanical Engineering
Major: System Dynamics and Control, Minor: Computer Science

UC Berkeley, 2019 - 2021
Master of Engineering, Mechanical Engineering
Major: Control of Robotics and Autonomous Systems

Hochschule Esslingen, 2018 - 2019
Bachelor of Engineering, Mechatronics

Tongji University, 2015 - 2019
Bachelor of Engineering, Mechatronics
Publications
* indicates equal contribution.Preprint
IteraOptiRacing: A Unified Planning-Control Framework for Real-time Autonomous Racing for Iterative Optimal Performance
Yifan Zeng*, Yihan Li*, Suiyi He, Koushil Sreenath, Jun Zeng
preprint
ArXiv

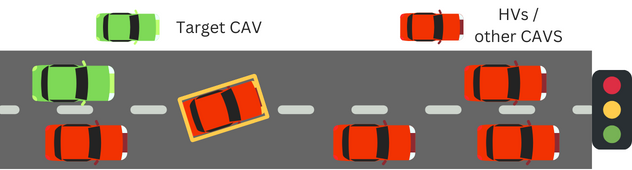
A Traffic Prediction-Based Individualized Driver Warning System to Reduce Red Light Violations
Suiyi He*, Maziar Zamanpour, Jianshe Guo, Michael W. Levin, Zongxuan Sun
preprint
ArXiv
2025
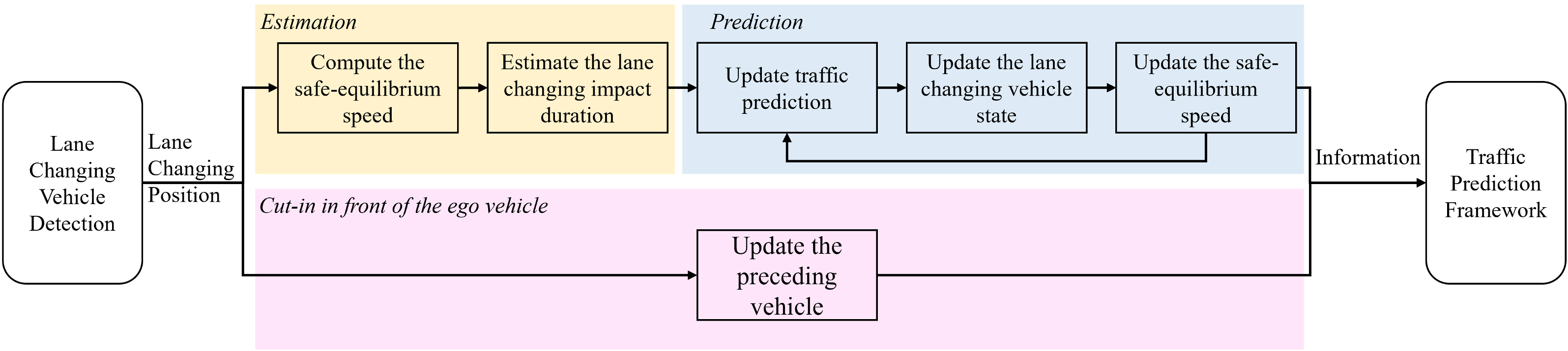
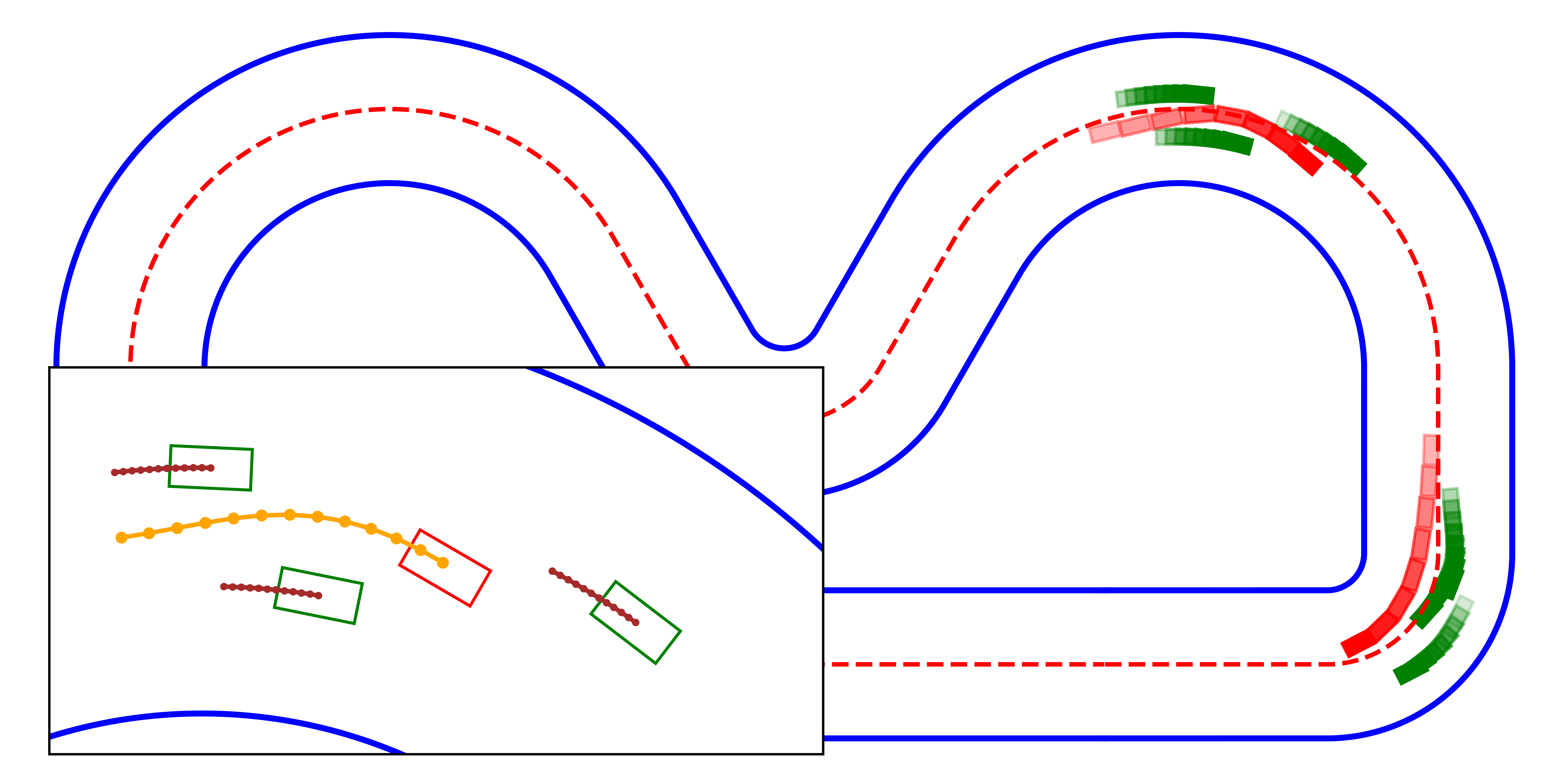
A Connectivity-Based Real-Time Traffic Prediction Considering Lane-Changing Maneuvers with Application to Eco-Driving Control of Electric Vehicles
Suiyi He*, Shi´an Wang, Yunli Shao, Zongxuan Sun, Michael W. Levin
IEEE Transactions on Vehicular Technology
Publisher
2024
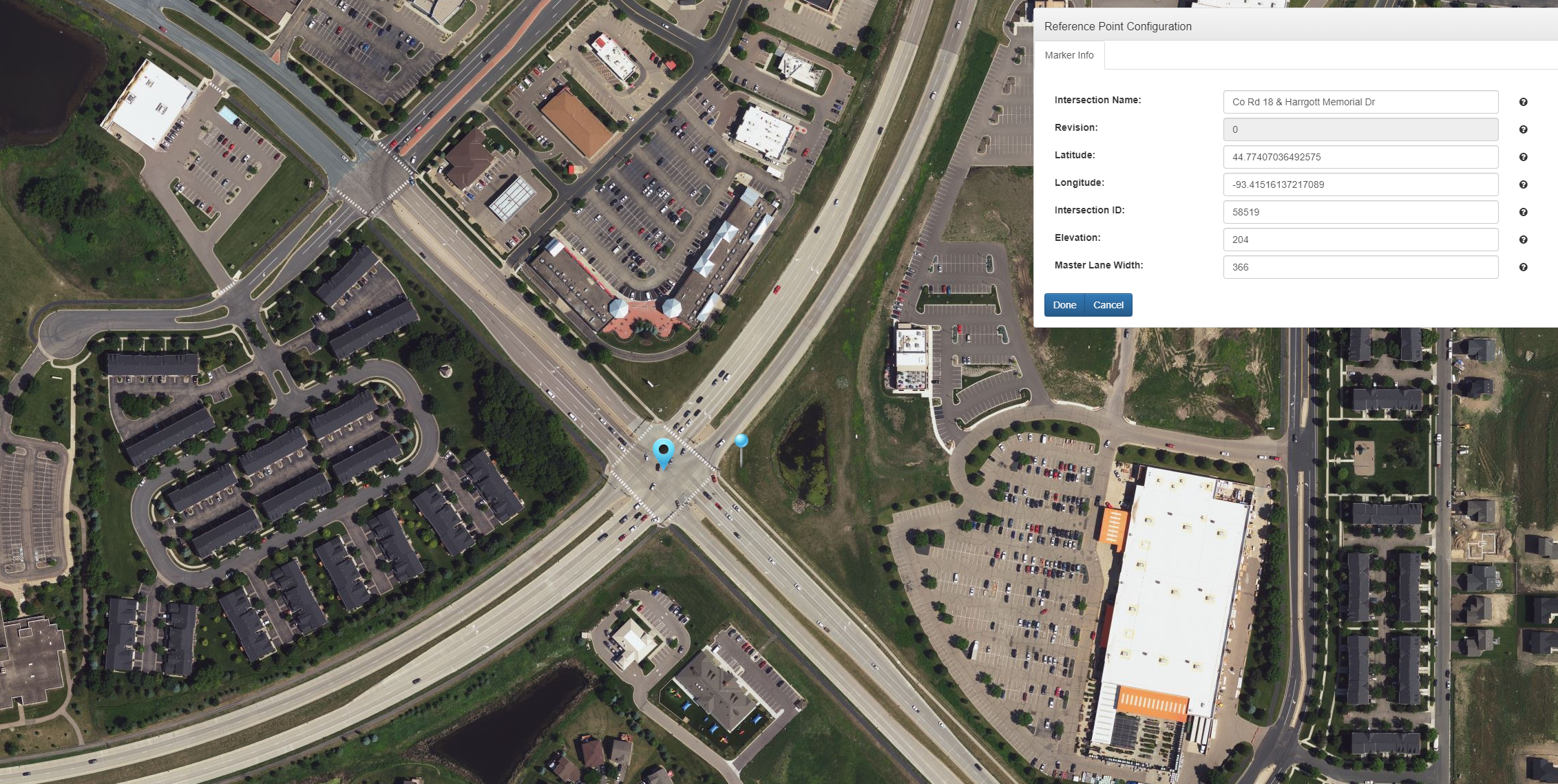
Development and Demonstration of a Novel Red Light Running Warning System Using Connected v2i Technology
Michael W Levin, Zongxuan Sun, Suiyi He, Maziar Zamanpour, Jianshe Guo
Minnesota Department of Transportation (MnDOT)
Publisher
2023
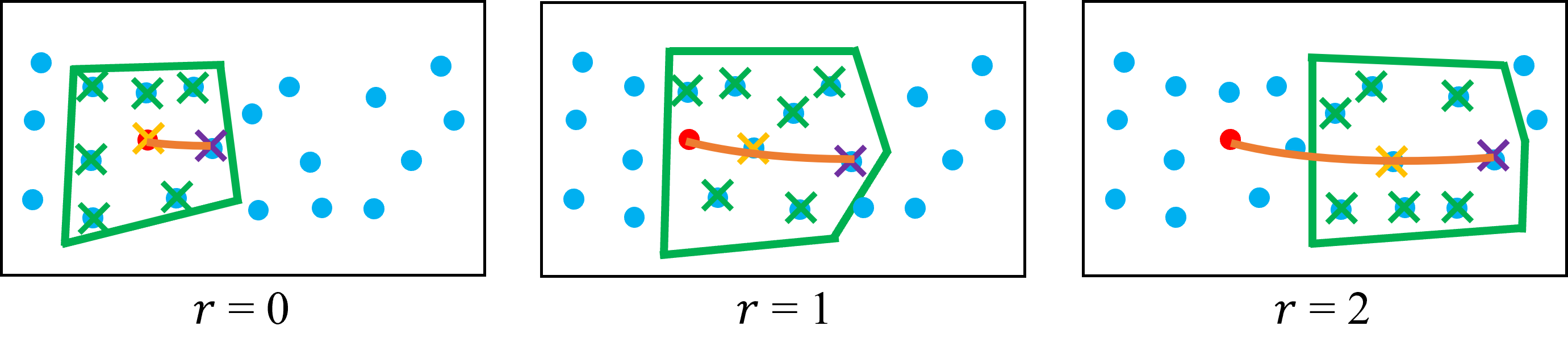
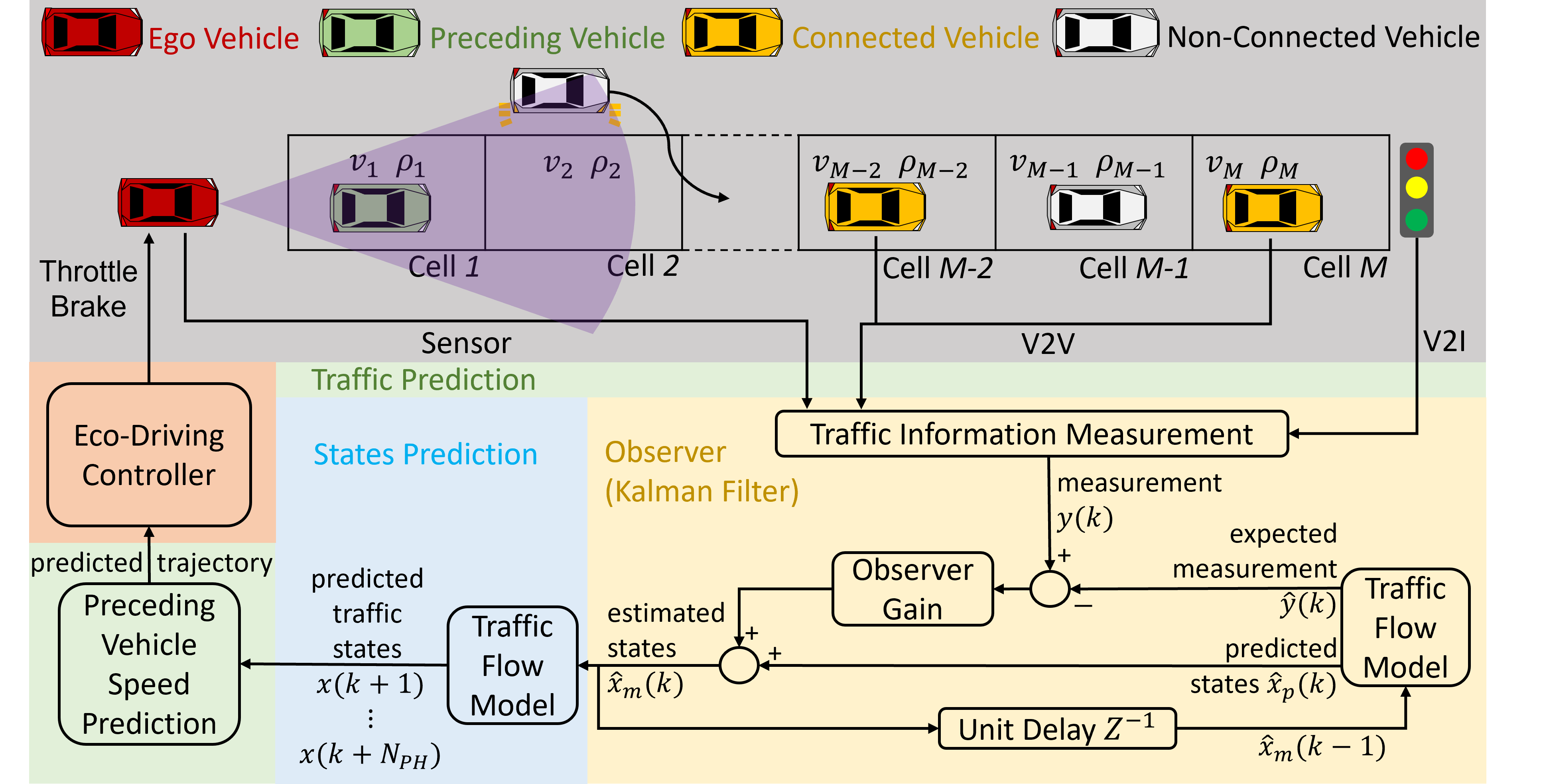
Real-Time Traffic Prediction Considering Lane Changing Maneuvers with Application to Eco-Driving Control of Electric Vehicles
Suiyi He, Shi´an Wang, Yunli Shao, Zongxuan Sun, Michael W Levin
IEEE Intelligent Vehicles Symposium (IV) 2023
Publisher /
ResearchGate
Cost/Benefit Analysis of Fuel-Efficient Speed Control Using Signal Phasing and Timing (SPaT) Data: Evaluation for Future Connected Corridor Deployment
Michael W Levin, Zongxuan Sun, Shi´an Wang, Wenbo Sun, Suiyi He, Bohoon Suh, Gaonan Zhao, Jacob Margolis, Maziar Zamanpour
Minnesota Department of Transportation (MnDOT)
Publisher
2022
2021
Awards & Honors
- Department of Mechanical Engineering PhD Fellowship, UMN, 2021
- DAAD Scholarship for International Students, German Academic Exchange Service, 2018
- The First Prize of Tongji Scholarship of Excellence, Tongji University, 2017
Professional Activities
Conference Reviewer: ACC, CDC, ICRA, IROS, L4DC, MECCJournal Reviewer: T-AC, L-CSS, RA-L, T-ITS, Automatica, T-MECH, T-VT
The latest update: Aug 2025.